特斯拉首席执行官埃隆·马斯克在公司的自动驾驶开放日上炮轰了激光雷达作为自动驾驶汽车传感器的技术局限:“这是一项价格极其昂贵,且毫无用处的技术。”该言论一出,业界哗然,毫米波雷达、视觉系统(摄像头)和激光雷达这三大自动驾驶传感器的江湖地位要被改写?
自动驾驶需多传感器融合应用
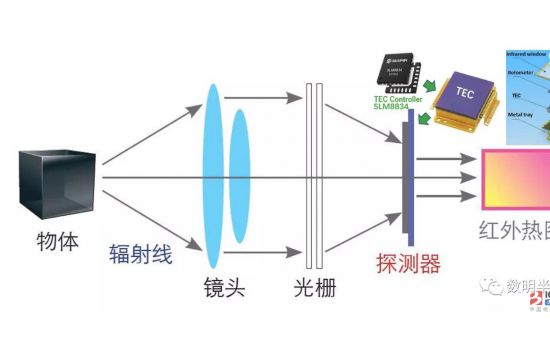
一台自动驾驶汽车的安全行驶,需要完成三个必须而关键的步骤:首先是感知阶段,即获取和收集外界环境和车辆自身的工况信息;然后,进入决策阶段,发出行驶指令,主要依赖各种控制芯片的云端算法;最后是执行阶段,将前端决策完毕的车辆信号“付诸行动”。可见,感知阶段是自动驾驶汽车安全行驶的初步保障,犹如汽车的“眼睛和耳朵”。
由于道路环境和车辆行驶的工况复杂多变,单一功能的传感器无法满足驾驶过程中实时变更的车辆信息。安森美半导体智能感知部全球市场及应用工程副总裁易继辉表示,传感器融合(包括视觉系统、毫米波雷达和激光雷达)和传感器的深度感知是自动驾驶汽车感知系统未来的发展趋势。
视觉系统(摄像头)可以通过丰富的成像信息进行各类识别运算,比如车道、行人和物体,还有停车场的横杆以及交通标识等,但在远距离成像及速度测定方面适应性不足。毫米波雷达是通过发射毫米范围的电磁波来确定障碍物的距离、速度和角度,免受雨雪、尘、雾等恶劣环境影响。由于受制于波长和尺寸的限制,毫米波雷达分辨率过低,且对于静止的物体和运动的非金属物体都不太敏感。激光雷达探测精度在三者中最高,可达到毫米级。它具有雷达的测距能力,探测精度和分辨率又高于雷达,具有摄像头的感知能力,又可以不受光线条件的限制。而缺点是成本高昂,且容易受到极端气候及烟雾粉尘的影响。
激光雷达能否被取代?
近年来,激光雷达成为业界备受争议的焦点。由于其高精度、高分辨率和高稳定性,几乎所有自动驾驶汽车厂商在过去几年间都无法回避激光雷达,这使得激光雷达几乎垄断了传感器市场,器件价格居高不下。因此,部分企业选择降低激光雷达的成本以实现盈利。谷歌自动驾驶公司Waymo独立之后做的第一件事,就是努力降低激光雷达的成本,从行业标准的7.5万美元降低90%。然而,盲目降低成本也会带来很多问题。据了解,有的企业为了降低整车价格,采用了更便宜的固态激光雷达,结果带来了新的问题。该雷达无法实现360度转动,难以探测背后的情况,要辅助安全驾驶还需引入新的传感器,在经济效益上并不可行。
为减少激光雷达部分的成本支出,以特斯拉为代表的一些汽车企业干脆将激光雷达拉进黑名单,开发出其他技术路线。记者从特斯拉官网了解到,一辆特斯拉的标配共有8个摄像头、1个77GHz的毫米波雷达和12个超声波雷达。赛迪顾问汽车产业研究中心总经理鹿文亮表示,虽然特斯拉汽车的配置列表中未见激光雷达的身影,但特斯拉会努力将其他传感器做得好一些,同时要配合算力较为强大的后端传感芯片和处理芯片。
由此可见,马斯克的“激光雷达傻瓜论”出现在当下这个时间节点并非偶然,传感器的确到了该重新思考方向的时候了。北京理工雷科电子信息技术有限公司汽车雷达事业部总经理金烨在接受《中国电子报》记者采访中表示,降低激光雷达的成本还需要时间。在研究机构中,激光雷达短期内还会是主要的环境感知传感器。然而,对应于以经营为目的的企业,避开激光雷达而选择其他技术路线将成为趋势。
鹿文亮表示,未来的自动驾驶汽车传感器有三条路可走:一是将传感器端(视觉系统、毫米波雷达和激光雷达等)性能做强,相应降低决策端的算力要求;二是用外部网络实现对自动驾驶的统筹控制,未来,5G网络将为车联网提供更强的技术基础,但短时间内还难以实现;三是彻底回避激光雷达,将摄像头、毫米波和超声波雷达等其他传感器融合应用,前端传感器探测精度不足等问题,将由决策端算力更强的芯片来弥补。
金烨表示,如果未来激光雷达成本可以下降到千元数量级以下,那么它成为无人驾驶核心传感器的可能性就会大大增加。然而,降低激光雷达成本成为最大挑战。特斯拉似乎早已彻底放弃使用激光雷达,试图通过多摄像头方案采集数据,再借助还原实际环境的模拟器来训练神经网络,通过智能视觉实现车辆对交通道路状况的“认知”,只是可靠程度难以下定论。
提升传感器性能是发展自动驾驶必经之路
无论自动驾驶传感器技术走上哪条路,提升视觉系统、毫米波雷达、激光雷达等器件性能都是“基本功”。首先,先进、智能的视觉系统是保障自动驾驶汽车安全行驶的核心部件,提升视觉系统的可靠性尤为重要。易继辉表示,自动驾驶对视觉类传感器的智能化(像素、理解和判断能力)提出更高要求。
特斯拉自豪于其自动驾驶机制,很大程度上是由于视觉器件玩得不错。据了解,其视觉器件总共有8个鱼眼、正常和长焦摄像头:包括应用于汽车后部的倒车摄像头、前方的三目摄像头和两侧各两个的侧视摄像头,侧前视和侧后视相互重叠可避免产生视觉盲区,基本可以保障Tesla的L3级别的变道、合流、出高速等功能。
九三学社中央科技委副主任、中国传感器与物联网产业联盟副理事长郭源生表示,目前摄像头在动态范围和近红外灵敏度等指标方面,还有很大的提升空间,单车需要更多性能更佳的摄像头。金烨表示,多目立体摄像头是未来传感器视觉系统的发展趋势,它有望融合激光雷达和摄像头的优势,既具有激光雷达的高密度距离点云直接提取障碍物并精准测距的特点,又具备了视觉识别与机器学习的能力。
其次,更多的信号处理算法和新制雷达技术将被移植到毫米波雷达的开发中,提供更加灵敏的探测障碍的感知系统。郭源生表示,近年来,汽车中应用的毫米波雷达模组包含了多个基于不同工艺的芯片,是相对比较笨拙的系统,且成本价格较高。为了追求更小尺寸和更低成本,各国正在致力于研发多功能元器件整合与集成、标准化通用的雷达芯片组。
易继辉表示,SPAD技术(单一光电雪崩二极管)将与毫米波雷达结合,有望帮助毫米波雷达大幅度提升感光倍数。在此基础上,金烨还表示,毫米波雷达的未来发展方向将是开发点云雷达,以低廉价格获得高分辨点云成像能力,逐渐取代激光雷达,开发更多的应用场景。
最后,若将激光雷达的精准探测能力、高分辨率等性能进一步提升,甚至与其他传感器件的功能进一步结合,激光雷达有望挑战更加复杂的自动驾驶环境以及其他更具挑战的应用领域。易继辉表示,图像传感技术可助力激光雷达的开发。据悉,上海理工大学的研究人员近日研发出一种基于激光雷达的新型感知系统,能够在烟雾弥漫的城市环境中拍摄45公里(28英里)以外的物体。该技术使用单光子侦测器,结合独特算法,将最稀疏的数据点“编织”在一起,生成超高分辨率的图像。新的激光雷达视觉技术明显提升了衍射的极限能力,有望为超远距离内的高分辨率、快速、低功耗的3D光学成像开辟新领域。
此外,激光雷达还亟须解决器件成本过高的问题。易继辉表示,业界已研发出可以替代传统机械式激光雷达材料的新型硅片技术,新技术可大幅降低激光雷达的器件成本,有望将其成本控制在几百美元之内。